地震監測對CNC工具機水平精度之影響
文/國立勤益科技大學 機械工程系 研究生 吳孟憲
國立勤益科技大學 機械工程系 教授 陳紹賢
研究目的
台灣與日本同為地震頻繁之區域,地震對工具機與精密機械之水平精度監測則相形重要,本研究開發一套長時間水平量測與監測系統,如圖一所示。透過持續且高精度的數據蒐集與分析,評估地震活動是否造成機台水平偏移,進而影響加工與量測精度。並且了解與分析地震對精密機械穩定性的潛在影響,並為未來的地震補償技術與精密加工設備設計提供參考依據。本研究證實地震與CNC工具機之水平精度關係時,其影響程度甚是輕微,其水平精度皆於0.02mm/m,消除地震發生後對於機台可靠度下降之疑慮產生。
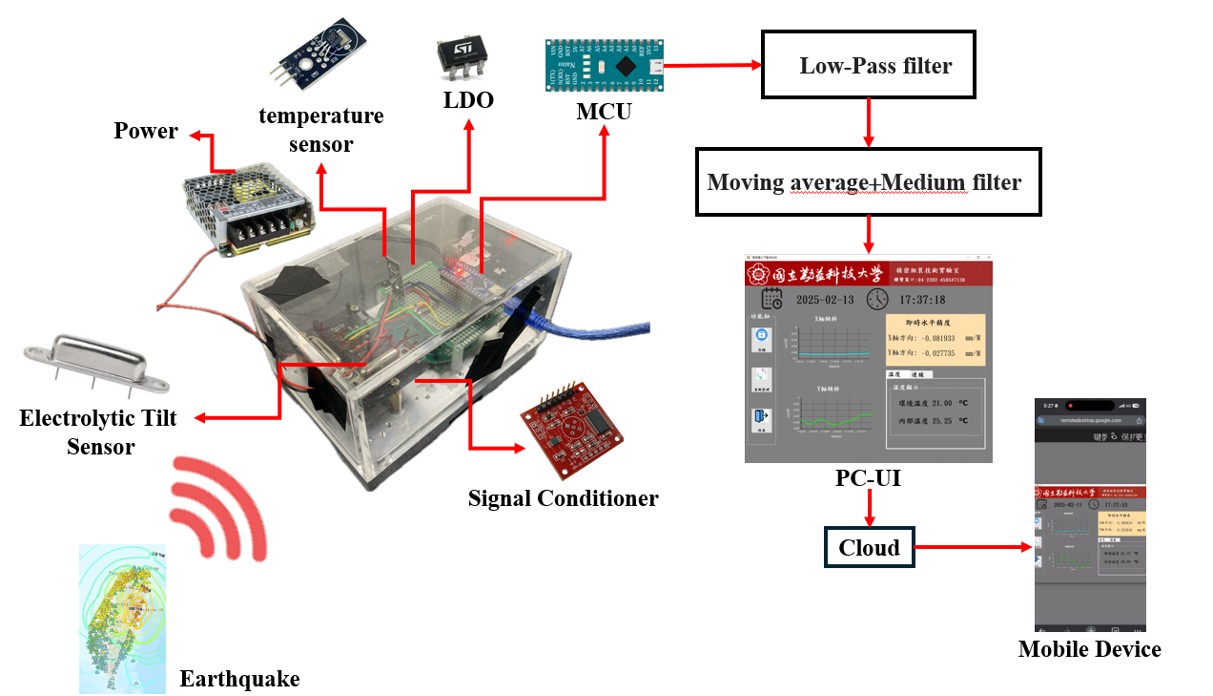
圖一:水平量測系統整體架構圖
研究方法
- 設備原理
本研究開發量測設備感測器採用電解式(Electrolytic)傾斜感測器如圖二所示。感測器外殼通常由金屬或玻璃構成,內部含電極與電解液,其原理如圖三所示,感測器有三個電極,分別為一個擷取電極以和兩個激發電極。經由兩端激發電極輸入電壓後,電壓經過電解液,擷取電極擷取兩個激發電極之間的電壓差。
當感測器處於水平狀態時,內部電解液覆蓋兩個激發電極比例相同,這使得激發電極與擷取電極間R1和R2電阻相同,而當感測器傾斜時,內部電解液覆蓋兩個激發電極比例不同,導致R1和R2電阻不同兩端電壓產生差如圖四所示。

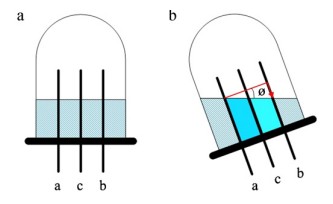
圖二:電解液感測器[1] 圖三:工作原理圖[2]
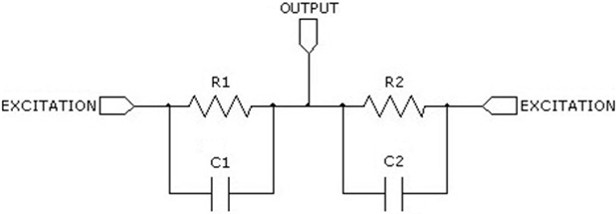
圖四:電解液感測器電路圖[1]
經由類比數位轉換器(Analog to Digital Converter)將擷取到的電壓轉換成數位訊號,其解析度由ADC解析倍率決定,θ為設備解析度,R為感測器量測範圍,n為ADC解析位元數,解析度計算如式(1)所示。
 公式(1)
公式(1)
0.0001˚≅6÷ 公式(2)
公式(2)
本研究所使用的ADC解析位元數為16位元,量測範圍為 ±3度,經過計算,本設備最小解析度為0.0001度如式(2)所示,使用此感測器需特別注意,兩個激發電極必須輸入占空比為50%且相互交錯的交流訊號,如圖五所示,若輸入直流電會導致電解反應,從而損壞感測器。
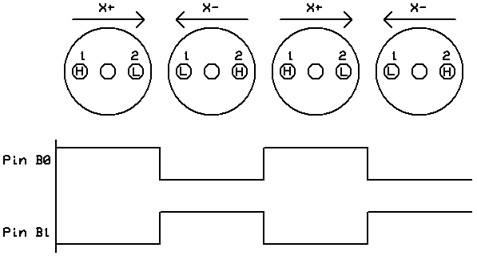
圖五:感測器訊號時序圖[1]
- 設備開發
本系統針對工具機水平校正量測設備進行開發,包含水平即時量測、水平可視化圖表及儀器內外部溫度監測三大功能,開發流程如圖六所示。
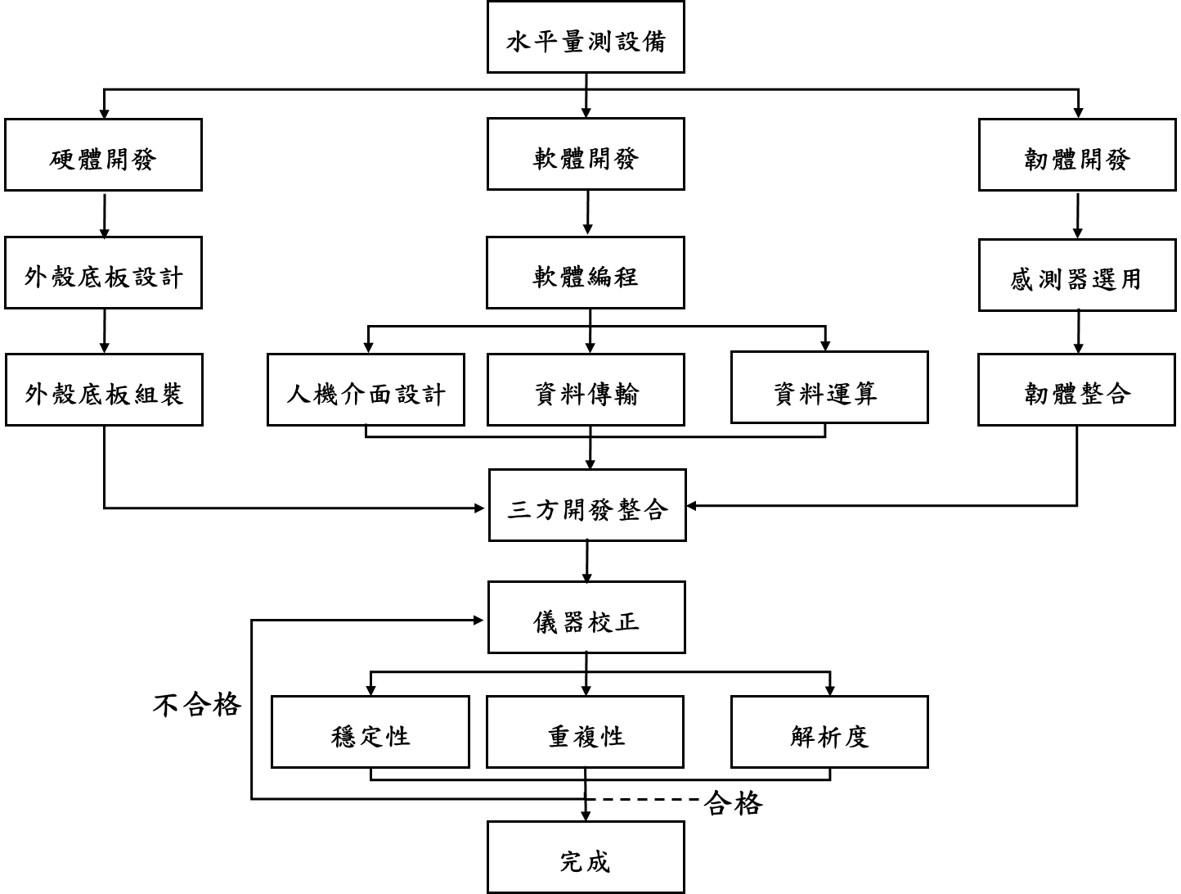
圖六:設備開發流程圖
硬體開發
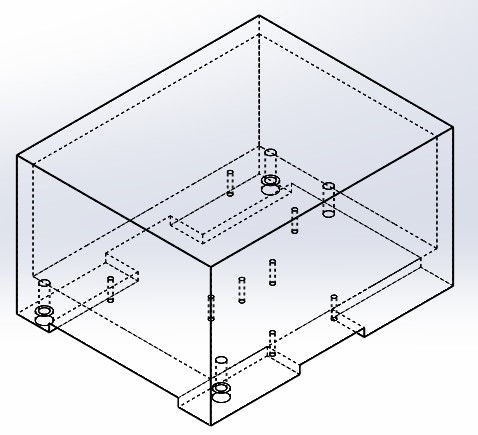
本設備以鋁合金材質作為底板原材料,並以壓克力作為外殼以便觀察內部情況外觀如圖七所示。
軟體開發
使用Visual Studio之中C語言windows form作為人機介面建置,軟體介面包括即時曲線、即時水平狀況、溫度監測、運行時長及數據擷取等功能如圖八所示。
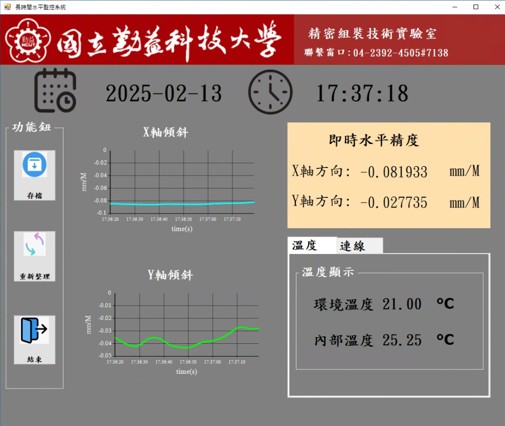
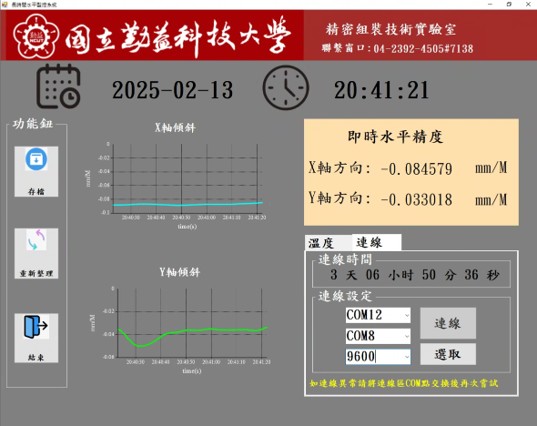
圖八:人機介面圖
韌體開發
本設備透過嘉立創EDA設計PCB(Printed Circuit Board,印刷電路板)。內含水平感測器、類比數位轉換器、微控制器及LDO電流穩壓系統等等。
3. 精度驗證
模型建立
將量測設備放置於正弦桿上,藉由調整正弦桿角度,並記錄感測器輸出的數位訊號值及正弦桿上量表的量測值,接著,使用Python中itertools模組
產生可能的分段組合,並計算每個組合的赤池信息準則(AIC)值,如式(3)所示n 為資料點數量、SSE為殘差平方和 (Sum of Squared Errors)、k為模型中的自由參數數量 (參數個數),以此選擇最佳的分段點。對每個分段組合是以最小平方法來調整參數,使得模型曲線盡可能貼合資料點,如式(4)所示,建模範圍為±0.5mm/m。X軸最佳分段點共有6個,量測模型之線性方程式如表一所列,圖九所示。Y軸最佳分段點共有10個,量測模型之線性方程式如表二所列,圖十所示。
 公式 (3)
公式 (3)
 公式 (4)
公式 (4)
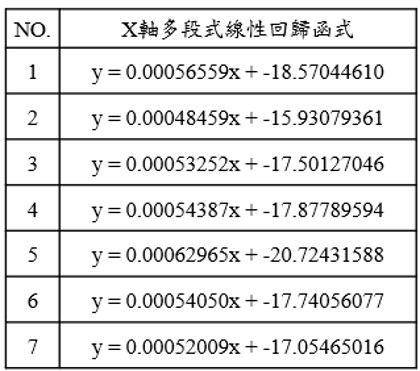
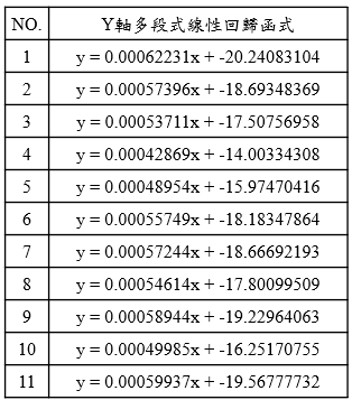
表一:X軸量測模型線性方程式 表二:Y軸量測模型線性方程式
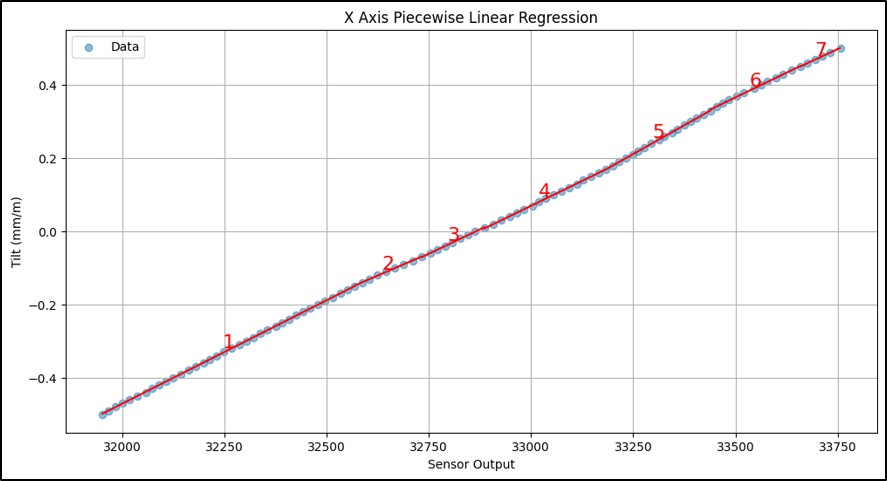
圖九:X軸多段式線性回歸
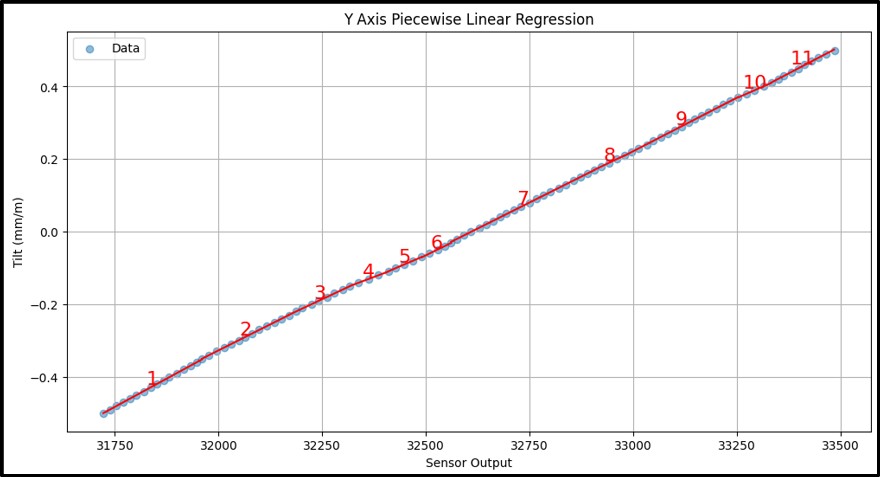
圖十:Y軸多段式線性回歸
穩定性測試
穩定性測試用以評估儀器在一定時間內測量值的穩定性。將量測儀器放置於正弦桿上,並在訊號穩定後以1Hz的取樣頻率進行數據收集,總計擷取360個數據點。X軸和Y軸分別進行了7次測試,實驗結果如表三、表四所列,根據製程能力等級表,測試結果均達到 A 等級指標。
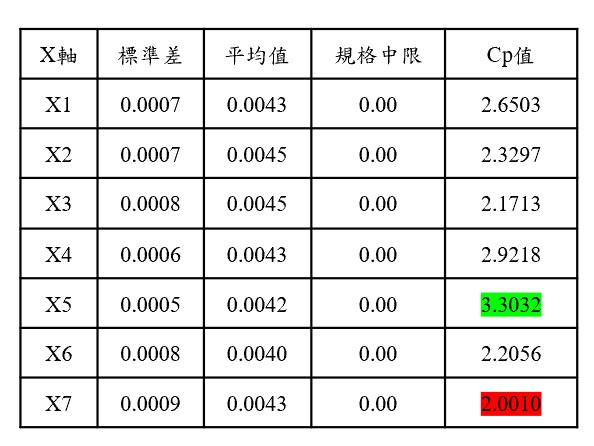
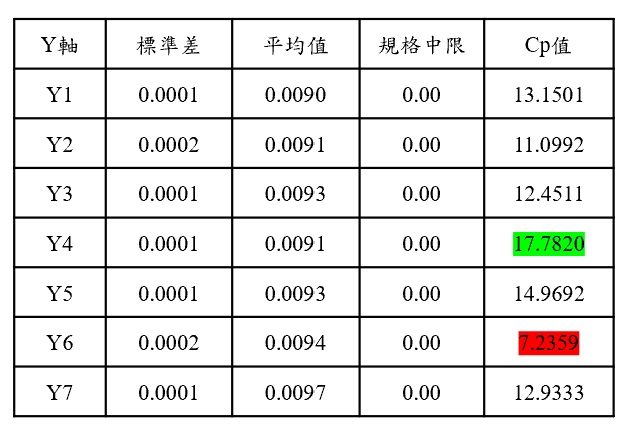
表三:X軸向穩定性測試結果。Unit:mm/m 表四:Y軸向穩定性測試結果。Unit:mm/m
重複性測試
將本設備放置於正弦桿上,並調整輸入變量,比對電子量錶與軟體所顯示的量測值。進行了21次獨立的測量,均使用相同的輸入變量,實驗結果如表五所列,對照製程能力等級表X軸和Y軸的重複性精密度與準確度均達到A等級。
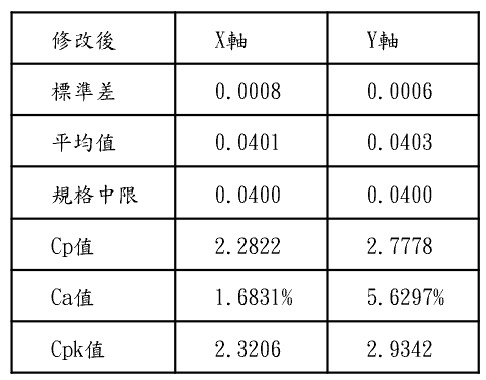
表五:X與Y雙軸向穩定性測試結果。Unit:mm/m
解析度測試
將本設備與市售Wyler電子式水平儀放置於正弦桿上,並調整輸入變量來觀測本設備與市售電子式水平儀脂數值變化,後續經由解析度測試結果比較圖可得知本設備解析度與市售水平儀趨勢相同,解析度可達0.002mm/m,如圖十一所示。
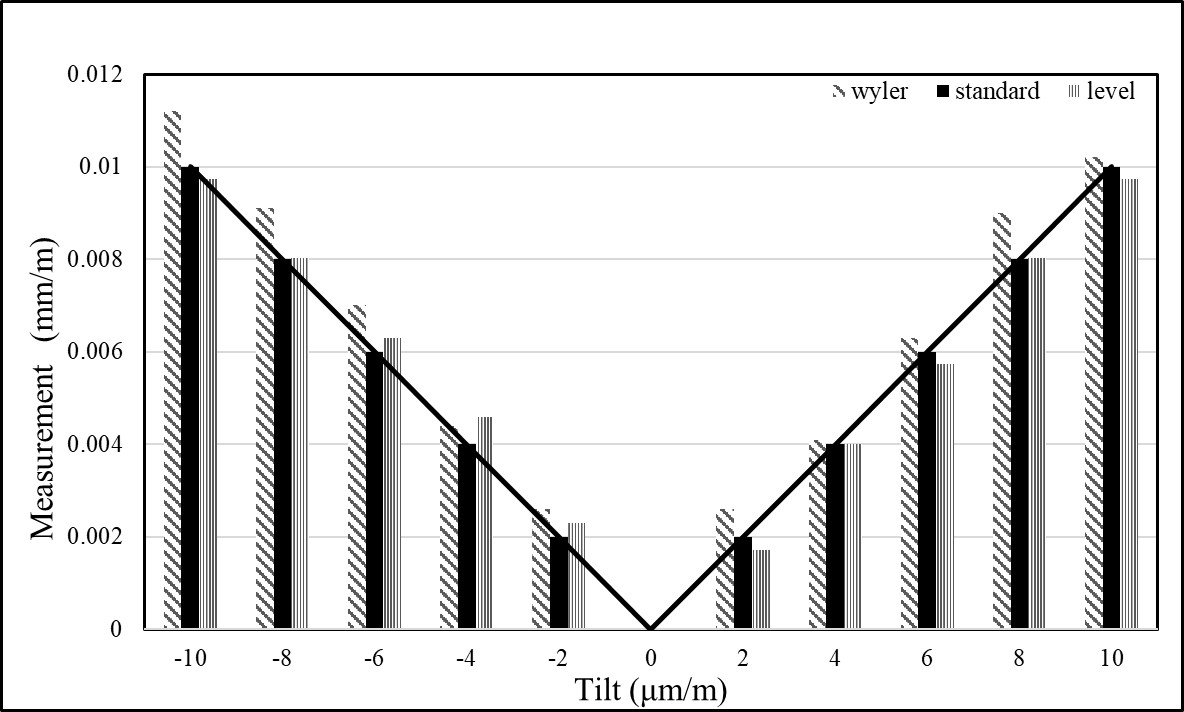
圖十一:解析度測試結果比較圖
4. 濾波方式
本研究採用二階低通濾波器對感測器擷取的訊號進行處理,轉換函式如式(4)所示s為拉普拉斯運算子、
 為自然角頻率、ζ(Zeta)為阻尼比。濾波前須先設定適當的截止頻率,該頻率作為訊號通過與阻擋的界線,確保高於截止頻率的雜訊得以顯著衰減,避免其干擾量測結果;同時,使低於截止頻率的有效量測訊號能夠無衰減地順利通過。透過此訊號處理方法,可提升量測數據的穩定性與準確性,並減少外部環境雜訊對系統水平精度的影響。
為自然角頻率、ζ(Zeta)為阻尼比。濾波前須先設定適當的截止頻率,該頻率作為訊號通過與阻擋的界線,確保高於截止頻率的雜訊得以顯著衰減,避免其干擾量測結果;同時,使低於截止頻率的有效量測訊號能夠無衰減地順利通過。透過此訊號處理方法,可提升量測數據的穩定性與準確性,並減少外部環境雜訊對系統水平精度的影響。
本研究首先以1Hz的取樣頻率擷取1000筆感測器量測訊號,並透過傅立葉轉換將此段時域訊號轉換為頻域進行頻譜分析,如圖十二、十三所示。從頻譜圖分析結果顯示,振幅最大的雜訊主要分布在0.1 Hz以上的高頻範圍,而感測器所擷取的有效訊號頻率則集中在0.01 Hz以下。基於此分析結果,本研究將0.01 Hz設定為低通濾波器的截止頻率。
當取樣頻率與對應的截止頻率後,將這些參數套用至二階低通濾波器的轉移函式中進行數據擷取與處理。透過濾波前後的比較結果顯示,結果如圖十四所示,水平檢測設備擷取為16bit(0~65535)數值於人機介面內的即時量測濾波前後數據,由量測結果可得知雜訊改善前訊號標準差為32.83經低通濾波後訊號標準差3.44,則改善89.52%。
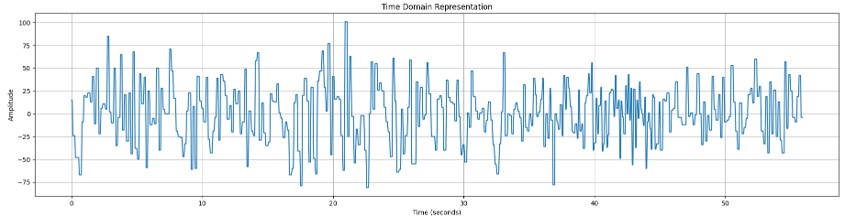
圖十二:感測器擷取訊號(時域訊號)
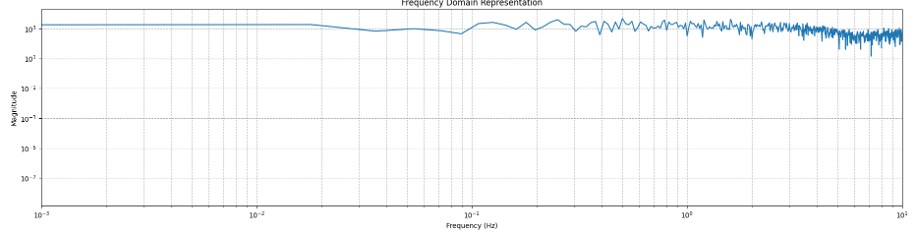
圖十三:頻譜分析圖
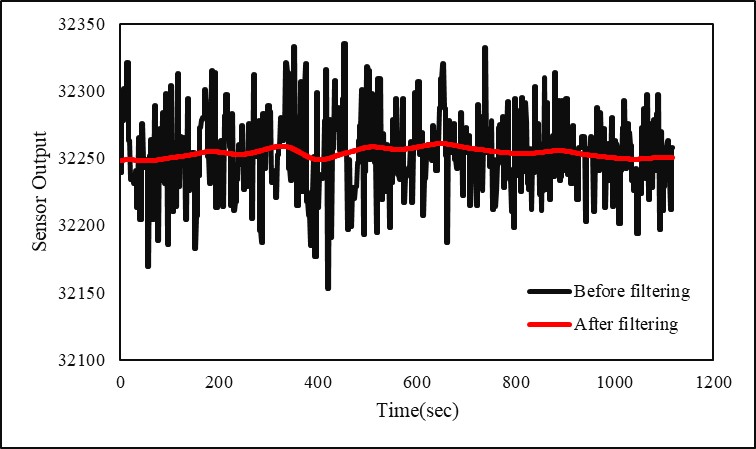
圖十四:濾波前後數據比較圖
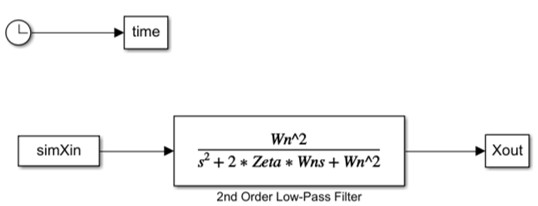
圖十五:二階低通濾波轉移函式[4]
實驗結果
本章節分為兩種主題做說明:第一部分為長時間運行對於水平設備之影響;第二部分為地震對於水平狀態之影響。
1. 長時間運行對於水平設備之影響
實驗場域運行測試
本實驗旨在探討水平量測設備在長時間運行下是否存在無法收斂並呈現無限發散的現象。研究目的是為了消除長時間觀測過程中,無法補償的發散現象所導致的數據可靠性下降問題,確保後續量測數據的穩定性與可信度。本實驗將水平量測設備放置於花崗岩平台上如圖十六,並以每分鐘擷取一筆數據的速率進行逐點記錄,藉此監測其數據波動與變化情況。本實驗將擷取一天之水平數據與溫度進行比對並計算其皮爾森相關係數如表六所示,得知水平狀態與溫度之間有強烈正關係,且數據並無發散現象產生結果如圖十七(a.b.c.d)所示。為驗證其長時間之狀態。
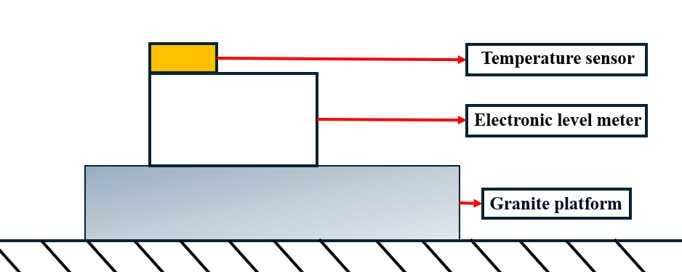
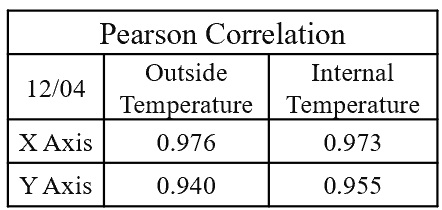
圖十六:設備擺放示意圖 表六:內外部溫度與雙軸傾斜皮爾森相關係數
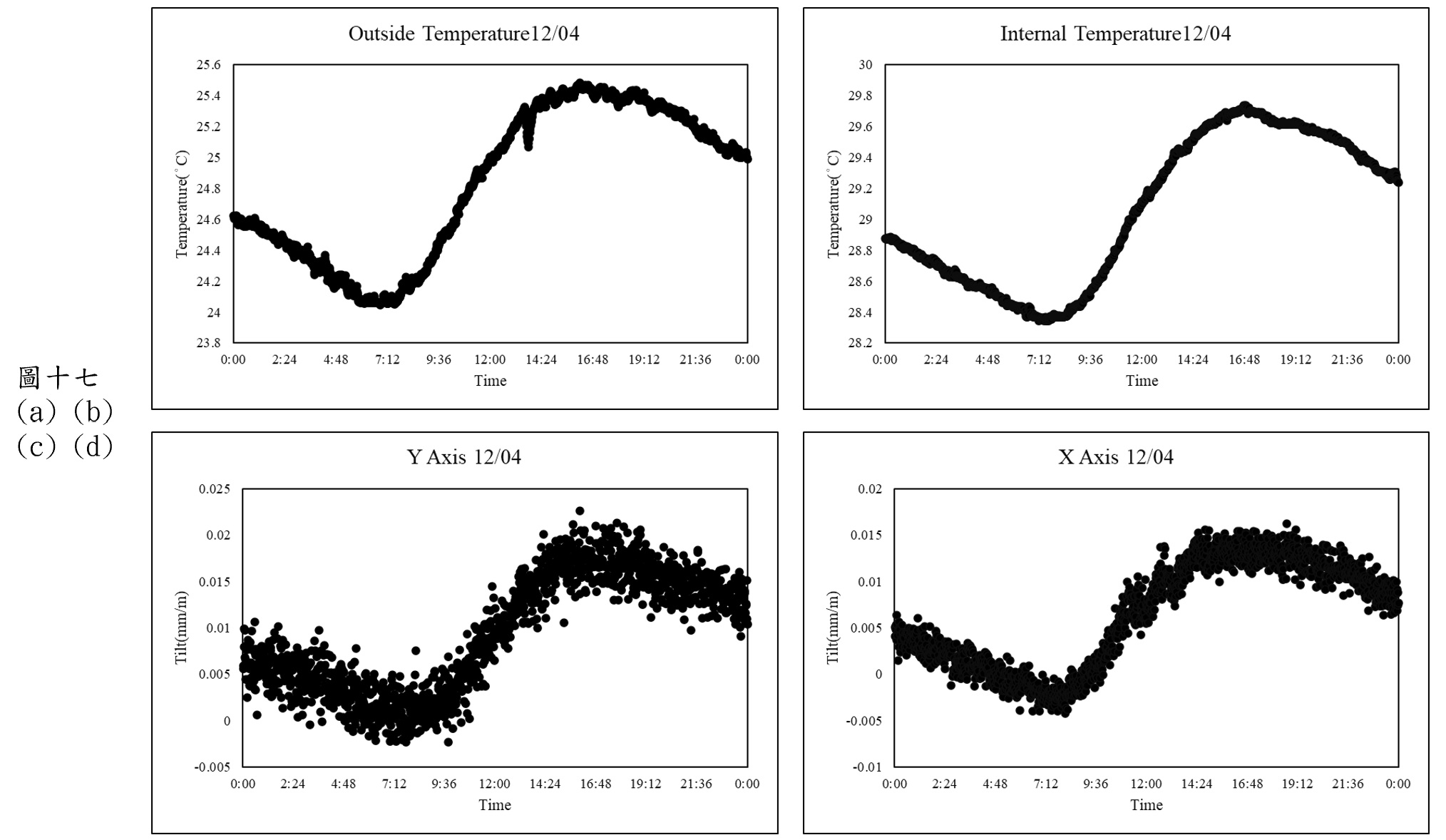
圖十七:12/04內外部溫度與實際水平狀態結果圖
實際場域運行測試
後續為確保水平量測設備在實際場域運行時趨勢與先前實驗一致,因而將本水平量測設備移置實際場域再次進行實驗安裝方式如圖十八所示。本實驗結果表明與先前實驗趨勢一致結果如圖十九所示,溫度與水平狀態之趨勢一致且水平狀態未向同一方向無限發散有收斂之趨勢,水平精度為0.04mm/m,且雙軸向趨勢一致其皮爾森相關係數如表七所示,在十四天時長之精度為0.04mm/m,如圖二十所示,可證明本設備在長時間趨勢下有足夠之穩定性。
表七:內外部溫度與雙軸傾斜皮爾森相關係數
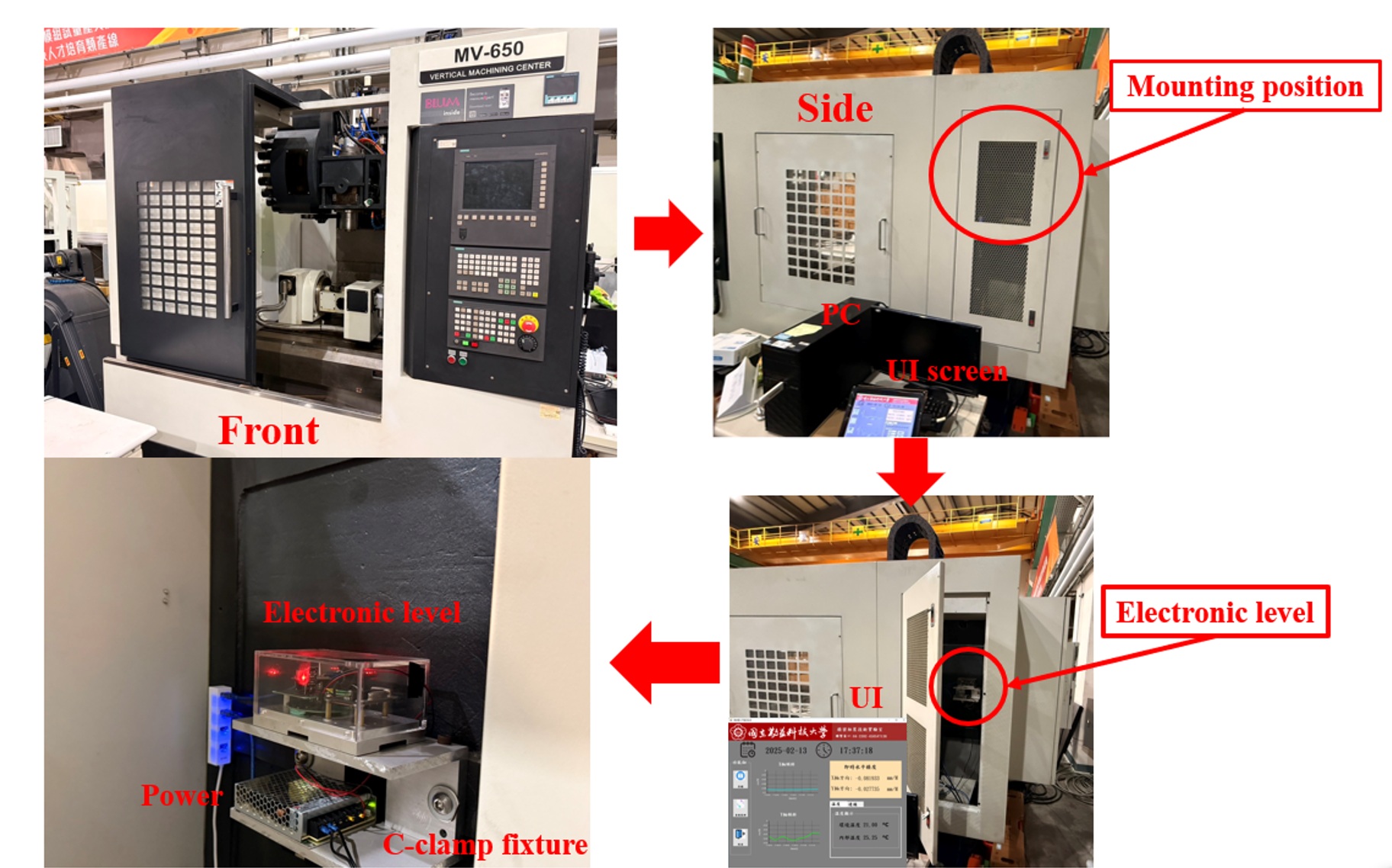
圖十八:機台安裝位置
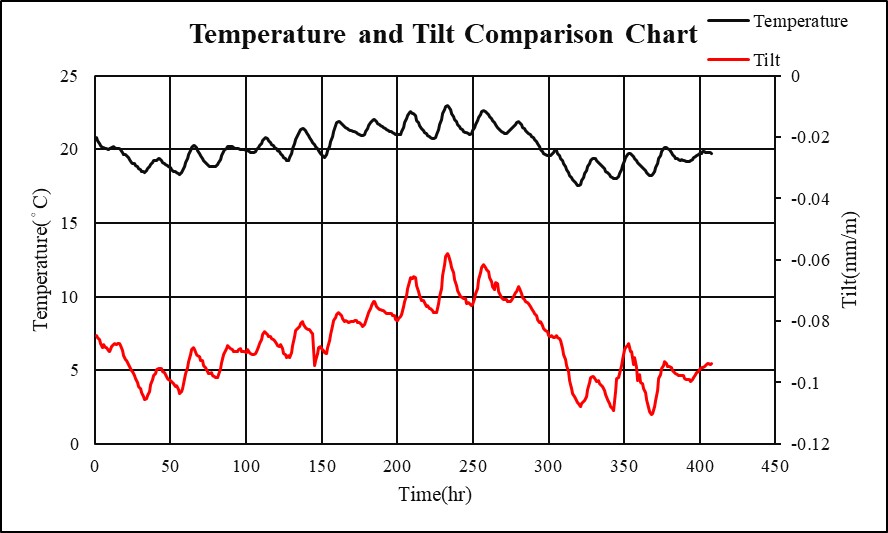
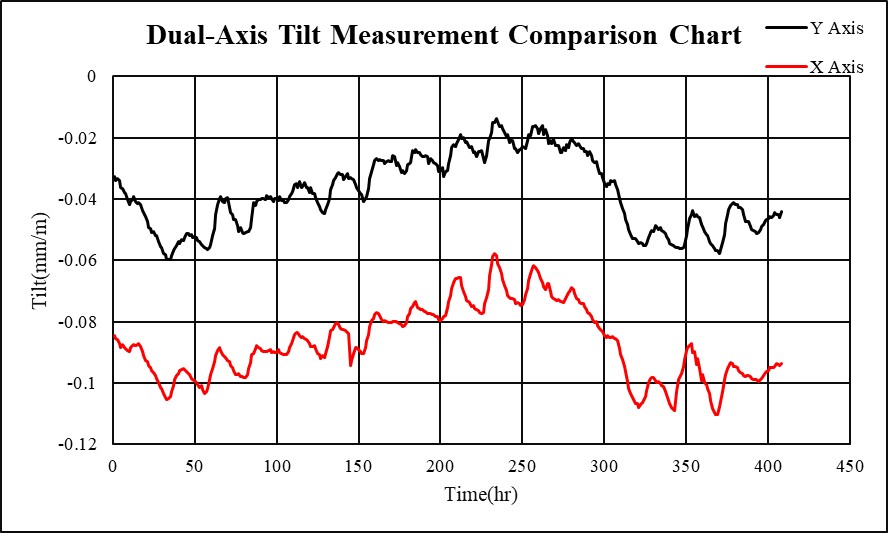
圖十九:溫度與水平狀態比較圖 圖二十:X軸與Y軸水平狀態比較圖
- 地震對於水平狀態之影響
本實驗旨在探討地震發生時是否會對工具機機台的水平狀態產生影響,包含結構永久性變形、地腳位移及地基坍陷等因素。透過長時間監測與數據分析,評估地震對機台水平精度的影響,確保機台在地震之後仍維持穩定的運作與精確的加工能力。
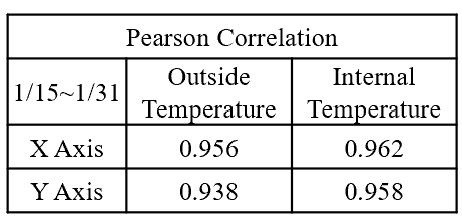
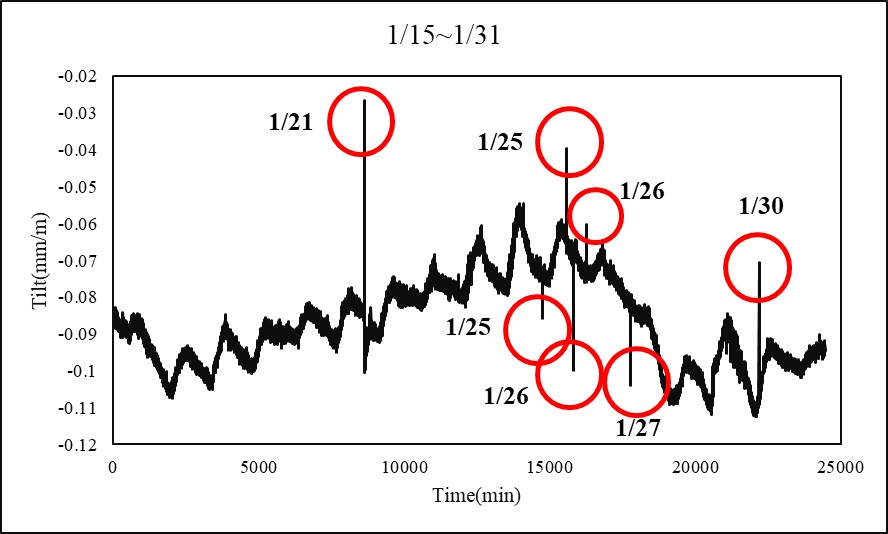
本次實驗因地震之隨機性因此將本設備藉由C型固定治具固定至機台上後逐點紀錄,如圖十八,並且每天進行資料統整在地震發生時藉由雲端功能時刻紀錄地震發生當下之水平情形,記錄時間為2025年1月15日至2025年1月31日,其中在台中地區發生7次有感地震,本水平量測設備皆有擷取該訊號如圖二十一所示,後續分別探討1月21號(極大有感地震)如圖二十二所示、1月25號(單日兩次地震)如圖二十三所示及1月30號(單日單次地震)如圖二十四所示。
當發生規模6.4級較大有感地震時,如圖二十二所示,機台的水平精度確實受到影響其誤差值為0.04mm/m。從放大圖中可觀察到一段拉扯狀態,推測為機台結構出現暫時性變形。經4小時後其水平狀態逐漸回復其誤差值恢復至5%內,其每日水平精度皆控制於0.02mm/m,將地震前後數據可視化後如表八所示,因此可判定地震會對機台的水平精度產生暫時性影響,而非永久性損害。
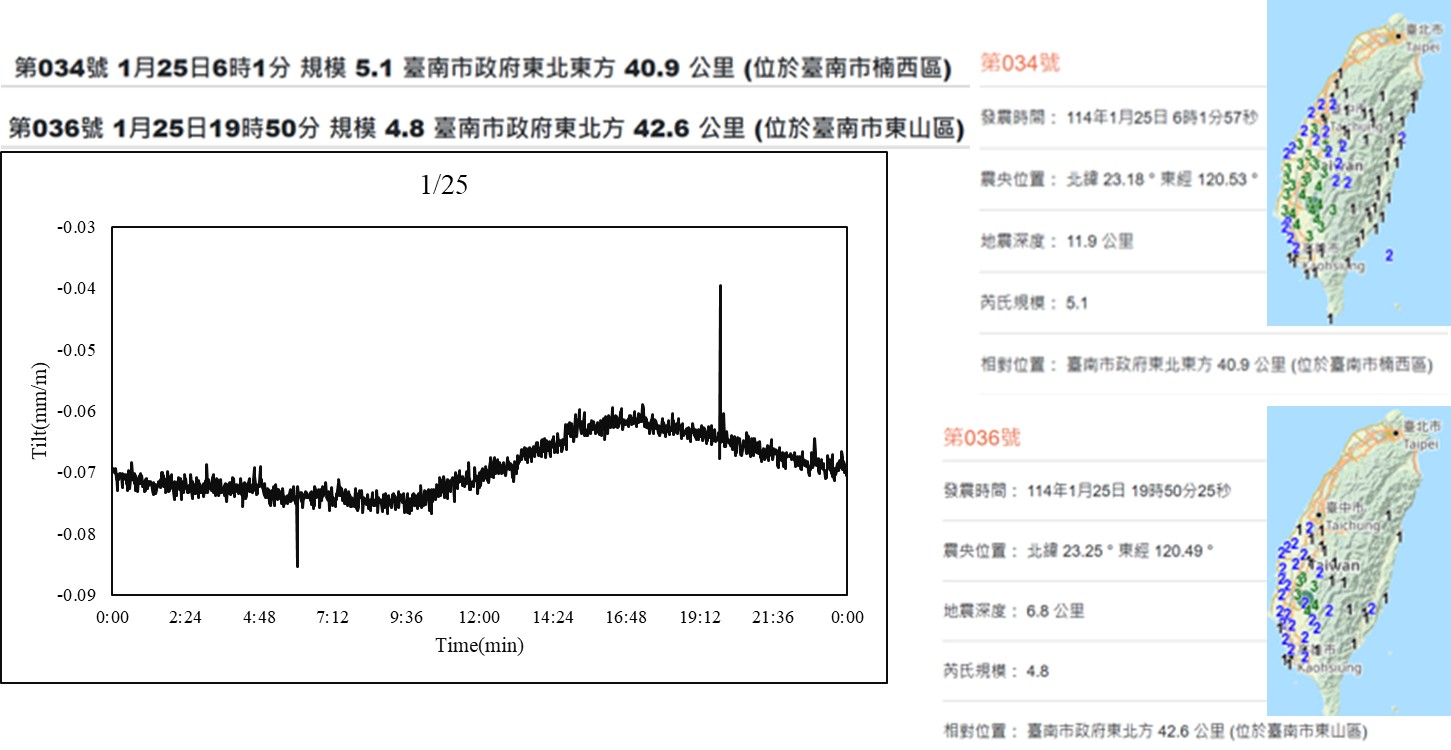
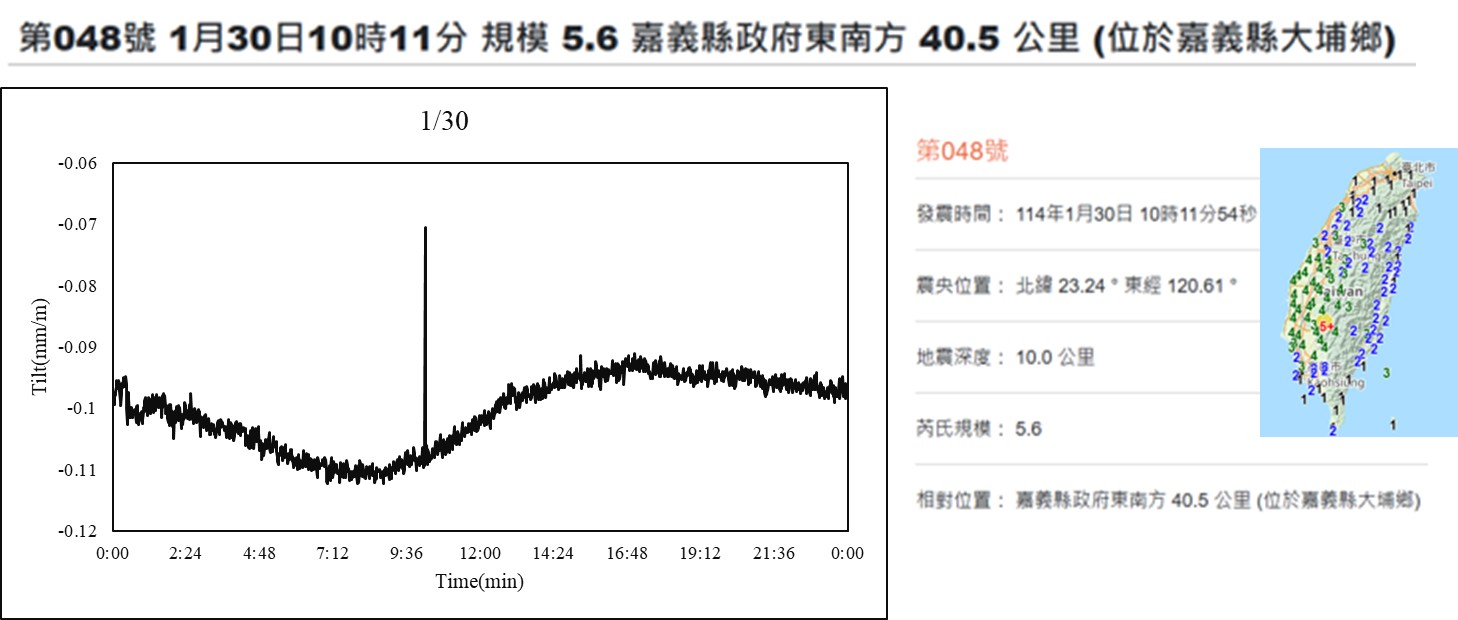
當發生規模5.6~4.8級相對較小的地震(台中地區約2至3級)中,如圖二十三與圖二十四所示,無論是雙次地震或單次地震,對機台水平精度的影響皆極為輕微。在三次地震事件中皆觀察到短暫的拉扯現象,但並未對整體的連續性波形產生顯著影響,以1月30號的情況為例,地震發生於10點13分觀察地震前、地震當下、地震後1分鐘的水平傾斜數值如表九所示,在地震當下水平精度有受到影響數值偏移33.79%,但地震後1分鐘之數據與地震前1分鐘數據進行比較誤差僅1.79%,此結果證明在小型地震下對於水平精度之影響不大。

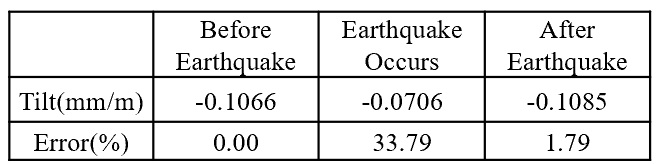
表八:地震前、地震當下、地震後誤差比較圖 表九:地震前、地震當下、地震後誤差比較圖

圖二十一:地震發生時水平狀態變化圖 圖二十二:1月21號水平狀態變化圖[5]
圖二十三:1月25號水平狀態變化圖[5] 圖二十四:1月30號水平狀態變化圖[5]
結論與未來展望
結論
本研究開發一款水平量測系統來進行機台的遠端監測,並即時記錄數據會整至雲端系統,提供便利性的同時兼顧精密度(Cp)、準確度(Ca)及精準度(Cpk)均達A等級。水平檢測設備擷取為16bit(0~65535)數值於人機介面內的即時量測濾波前後數據,由量測結果可得知雜訊改善前訊號標準差為32.83經低通濾波後訊號標準差3.44,則改善89.52%。本研究根據設備在長時間運行有微量飄移現象,主要問題於關鍵參數(溫度)變化狀態。在證實地震與CNC工具機之水平精度關係時,其影響程度甚是輕微其水平精度皆於0.02mm/m,消除地震發生後對於機台可靠度下降之疑慮產生。
未來展望
考慮非線性因素的影響希望能對溫度、微小振動等因素對水平儀的非線性影響,並建立非線性模型進行補償後,再次進行實驗。更換水平量測系統之量測位置進行多方位比較消除僅有單一點位的隨機性誤差。軟體開發地震警報器,並對地震後的良好加工精度判別,及後續探討多少能量之地震會對水平精度造成永久性影響,亦或將地震能量分割探討地震強度與水平精度之間的關係與百分比等等。
參考文獻
- The Frederick Company ,Application Note AN1000 Electrolytic Tilt Sensor Excitation,技術資料。
- The Fredericks Company,Electrolytic Tilt Sensor Selection & Operation,技術資料。
- 楊素芬,2013,品質管理,華泰文化。
- 楊仲薇,2022,應用貝葉斯線性迴歸於幾何精度量測系統溫度即時補償之研究 ,國立勤益科技大學,碩士論文,台中市。
- https://scweb.cwa.gov.tw/zh-tw/earthquake/data/
- 葉怡成,2017,用Excel學商業預測 ― 終身受用的原理與實作,第一版,博碩文化股份有限公司,新北市。
- 陳彥哲,工具機水平精度量測設備即時模型切換與穩態判別之研究,國立勤益科技大學,機械系碩士論文,台中市,2024。
- 陳俊丞,”應用支持向量回歸於水平量測設備溫度漂移誤差即時補償之研究”,國立勤益科技大學,機械系碩士論文,台中市,2024。
- 李季洵,精密機械於不同溫度場域之幾何精度預測,國立勤益科技大學,碩士論文,台中市,2019。
- 紀綺麗,水平精度對運動真直度之影響分析,國立勤益科技大學,碩士論文,台中市,2019。
- 曺家鑫,工具機支撐螺絲與水平調整之系統模組設計開發應用,國立勤益科技大學,機械系碩士論文,台中市,2021。



